
Introduction
La première version du robot aspirateur était relativement fonctionnelle mais le robot se retrouvait assez vite coincé (dans un angle ou sous un meuble). Jen ai rapidement conclu que la forme rectangulaire du robot lhandicapait beaucoup dans sa tache.
La principale évolution entre les deux versions du robot aspirateur est ladjonction dun carénage de forme ronde. Jai choisis dutiliser une soucoupe de pot en plastique de 33 cm de diamètre pour faire la coque du robot. La mécanique a complètement était revue de sorte que le robot soit plus compact et rentre dans la soucoupe.
Capteurs
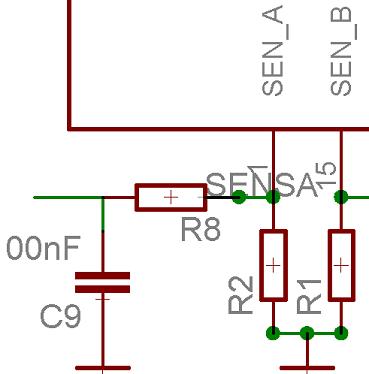
Les capteurs infra rouges ont été enlevés car ils ne servaient plus à rien derrière le carénage. Pour éviter que le robot ne soit coincé dans un obstacle, jai décidé de ne rien laisser à lextérieur de la coque. Jai donc développé lidée de détecter les obstacles grâce à la mesure du courant dans les moteurs. Jai donc ajouté un filtre RC passe bas entre le L298 et le dspic.
Malheureusement, quand le robot rencontre un obstacle (de face ou sur le coté), les deux roues ont tendances à sarrêter en même temps et il interprète cela comme un contact frontale.
Pour éviter cela je pense quil faudrait utiliser des micro-switchs mais je nai pas encore trouvé comment les adapter à la coque.