Introduction
Quand jai débuté, le premier robot que jai voulu construire était un robot aspirateur. Jai donc commencé par faire un petit tour sur Internet pour voir les réalisations déjà existantes. Malheureusement je nai pas trouvé grand chose de très concluant. Jai vite remarqué que de manière assez paradoxale, la partie la plus compliquée à réaliser nest pas la partie électronique ou robotique mais la partie aspirateur. Jai donc décidé de commencer par un robot avec une mécanique moins élaborée.
La réalisation amateur actuelle la plus aboutie que jai pu voir est, à mon avis, le robot de lAQRA. Néanmoins, le constat reste toujours le même : laspirateur est toujours compliqué à faire car il faut de lexpérience et du matériel. Ce nest donc pas vraiment une réalisation à la portée dun débutant. Récemment sont apparus des petits « balais aspirateur » électrique bon marché, compacts et légers ; on les trouvent facilement sur le net. Ils présentent aussi lavantage dêtre livré avec une batterie et un chargeur qui nous seront bien utiles pour alimenter le futur robot aspirateur.
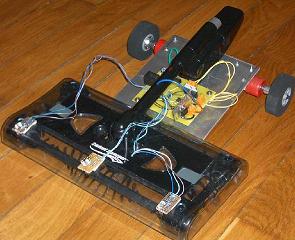
Ce projet a donc pour but de concevoir et réaliser un robot aspirateur performant, rapide à mettre en oeuvre et à la portée des débutants. Le reste du robot est alors composé, très simplement, dun châssis, de deux moteurs, et dune électronique construite autour dun microcontrôleur de chez Microchip : un dspic 30F4012. Loriginalité de ce projet réside donc dans lutilisation dun balai électrique pour construire un robot aspirateur de sorte quil soit accessible à un débutant.